
Heriot-


|
- |
Aims |
|
- | |
|
- |
|
- | ||
|
- |
|
- |
Use the knowledge gained in activity 5 to make the robot move in curved lines just like a bowling ball. Pupils have to relate the desired action of the robot to a position of a POT
- Working robots (switch controller disconnected)
- Sets of skittles (e.g. empty water bottles)
Large floor area space e.g a hall.
- Robots don’t always move in straight lines. In fact, moving in curves round obstacles can be quicker than moving in straight lines only, and can use less battery energy. Thus allowing the robot to work for longer.
- Curves can be created by moving the wheels at different speeds. These curves can vary from tight circles and spins to long slow arcs.
|
1. |
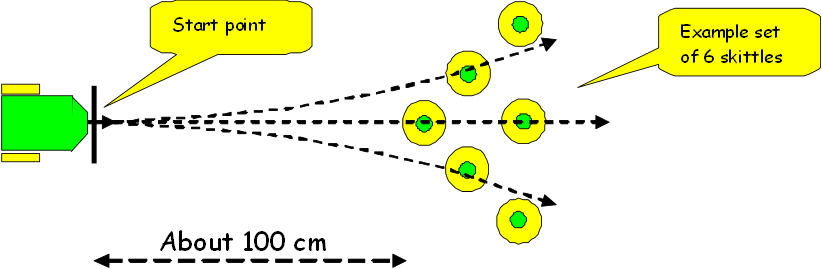
Set up a number of bowling rinks with a set of skittles about 100cm from the start point. |
|
|
|
|
2. |
The robot MUST always start pointing straight ahead. This is to ensure that the pupils have to adjust the POTs to get the robot to take a curved path.
The adjustments are POT1 - POT2 - POT3 -
|
|
3. |
Use mode “A0” for this activity. Switch sequence is “A_D_2A” |
|
4. |
To do a run do the following
|
|
4. |
Allow groups to practice using the three POTs to set different curved paths. Encourage them to take notes on the outcome of various settings. |
|
5. |
Complete the activity by having a competition with one skittle set-
|
- The setting of POTs 1 and 3 affect each other. If pupils are have difficulty then
suggest that they set a fixed speed (POT-
1 ) and only vary POT-3 . - Please take some pictures and video and send them to me. However, please make sure that I have permission to put them on public web sites.