
Heriot-


|
- |
Aims |
|
- | |
|
- |
|
- | ||
|
- |
|
| ||
|
- |
|
|
|
Class competition based on robot driving skills.
- Working robots
- Four robot storage boxes
- Stop watches
- Object catcher wires in class kit. (if doing the football style competition)
Requires large floor area e.g. gym hall
|
1. |
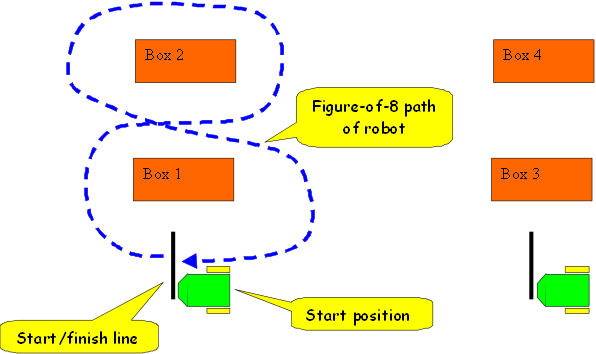
Build a competition arena using four robot cardboard boxes and two strips of black
tape. We have suggested a figure- |
|
2. |
|
|
3. |
Two teams would race at once (head- |
|
4. |
For each team
|
|
5. |
The referee will stop the stopwatch when the robot touches the finishing line. The times would be recorded for each team (maybe a bonus deduction of a few seconds for winning a heat) |
|
6. |
Start with a league system where each team get 2 or 3 goes. The best four teams
would then run semi- |
- The aim is to get the teams to use their driving skills. During practice, we encourage team members to cooperate and help each other. With the task requiring quick dexterity, some pupils find it easier than others.
- In previous school robot events we have used a figure-
of- eight course for the team competition. It contains enough variation to make it interesting but stops short of being too difficult. However, please choose whatever course you think is suitable. We would be interested in other types of courses. - For example, the course could include an object which each team member would have to hit during their run.
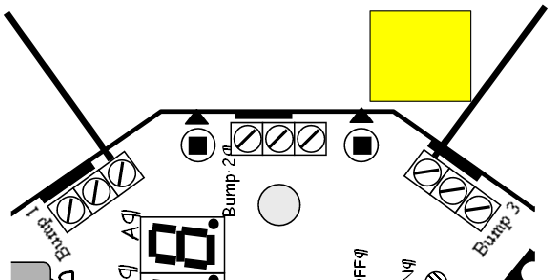
- By building a cube catcher at the front of the robot, the teams can then catch and
manoeuvre a small cube (ping-
pong size) to a goal. Cubes are better than balls as they don’t roll away. - The class kit contains a number of brown plastic coated wires (about 7cm in length that can be used as catchers. These can be screwed into any of the front bump terminal blocks, as in the following diagram
- The competition can consist of timing how long a team takes to get three cubes into a goal area.
- The teams can be given the choice of joystick mode – mode “J0” (has reverse but no curve) or mode “J1” (curve but no reverse).